









上海高校腦機接口成果助力提升四足機器人應用潛力
中新網上海3月17日電 (許婧 徐舟)據華東理工大學17日發布的消息,該校金晶教授領銜的腦機接口及控制團隊有了一項最新研發成果——“面向四足控制的混合現實增強腦-機接口系統”。

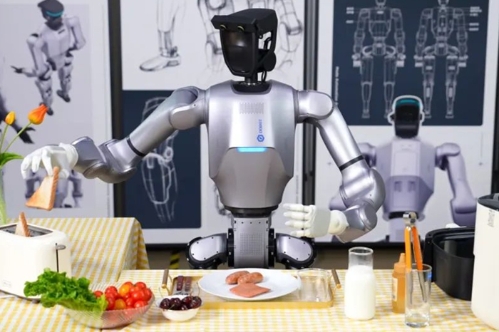
華東理工大學腦機接口成果提升四足機器人應用潛力。(華東理工大學供圖)
在團隊開展的相關成果測試中,測試者戴著“智能頭環”,通過指令,可以讓一只約40厘米高的機器狗進行原地踏步、直行、轉彎等動作。
“這項研究為機器人控制提供了一種全新的交互范式,它通過混合現實技術與腦機接口的深度集成,能夠實現對機器狗的高效、穩定控制,并且能適應多種復雜場景。”華東理工大學教授金晶說。
根據研究者介紹,傳統的BCI(腦機接口)系統進入現實場景后,容易受環境光干擾,便攜性也差。
為克服光干擾,研究團隊引入混合現實技術(MR),將視覺刺激直接嵌入用戶的現實視野中,通過MR設備,有效克服了環境光干擾的影響,同時顯著提高了信號的識別準確率。
除了抗干擾之外,該系統的便攜性和場景適應性也大有提升,為復雜環境下的機器人控制提供了更加可靠和靈活的解決方案。
通過模塊化設計和靈活的算法配置,新系統同時還具備強大的場景適應能力,可以快速適應不同場景的需求。以醫療康復領域為例,系統可以用于幫助行動障礙患者進行康復訓練。
新系統將顯著提升四足機器人的應用潛力。例如,在災害救援中,救援人員就可以通過腦電信號控制四足機器人進入危險區域執行搜救任務。
“強環境光干擾下的高性能表現,輕量化的便攜設計,以及廣泛的應用場景適應性,這些都標志著腦機接口技術從理論研究走向實際應用的突破。”金晶教授說。(完)
【編輯:梁異】

發表評論
文明上網理性發言,請遵守新聞評論服務協議
收藏文章
登录
表情删除后不可恢复,是否删除
取消
确定
图片正在上传,请稍后...
取消上传
评论内容为空!
还没有评论,快来抢沙发吧!
國內新聞精選:
 2025年03月18日 21:34:13
2025年03月18日 21:34:13 2025年03月18日 20:22:41
2025年03月18日 20:22:41 2025年03月18日 16:48:03
2025年03月18日 16:48:03 2025年03月18日 14:20:12
2025年03月18日 14:20:12 2025年03月18日 11:21:23
2025年03月18日 11:21:23















































 京公網安備 11010202009201號
京公網安備 11010202009201號